I am a robotics enthusiast with broad interests in optimal control,
control theory and applied optimization for agile robotics systems such as
quadrupeds and quadrotors.
Cerberus: Low-Drift Visual-Inertial-Leg Odometry For Agile Locomotion
Shuo Yang, Zixin Zhang, Zhengyu Fu, Zachary Manchester
ICRA 2023 (Accepted)
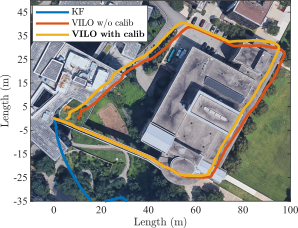
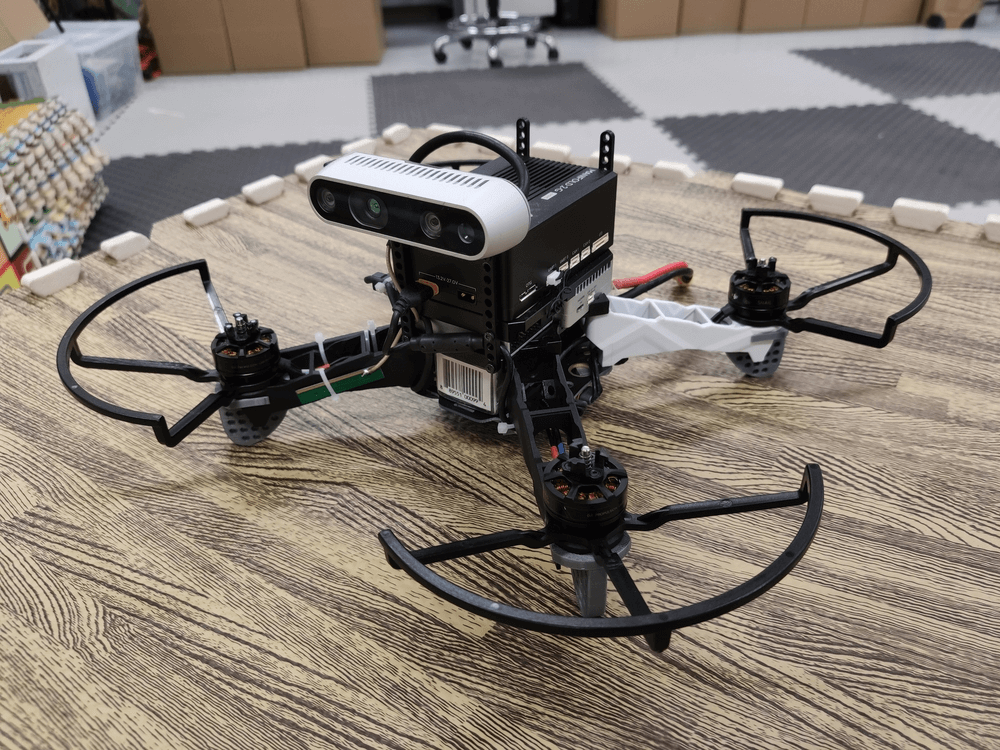
An open-source Visual-Inertial-Leg Odometry (VILO) state estimation solution, Cerberus, for
legged robots that estimates position precisely on various terrains in real time using a set of
standard sensors, including stereo cameras, IMU, joint encoders, and contact sensors.
Master's thesis - From Spatial to Functional: Functional
Scene Graph for Enhanced Robotic Decision Making
Existing scene graphs primarily capture spatial relationships but often overlook the functional
roles of objects, limiting robots' ability to understand and interact with their environments
effectively.
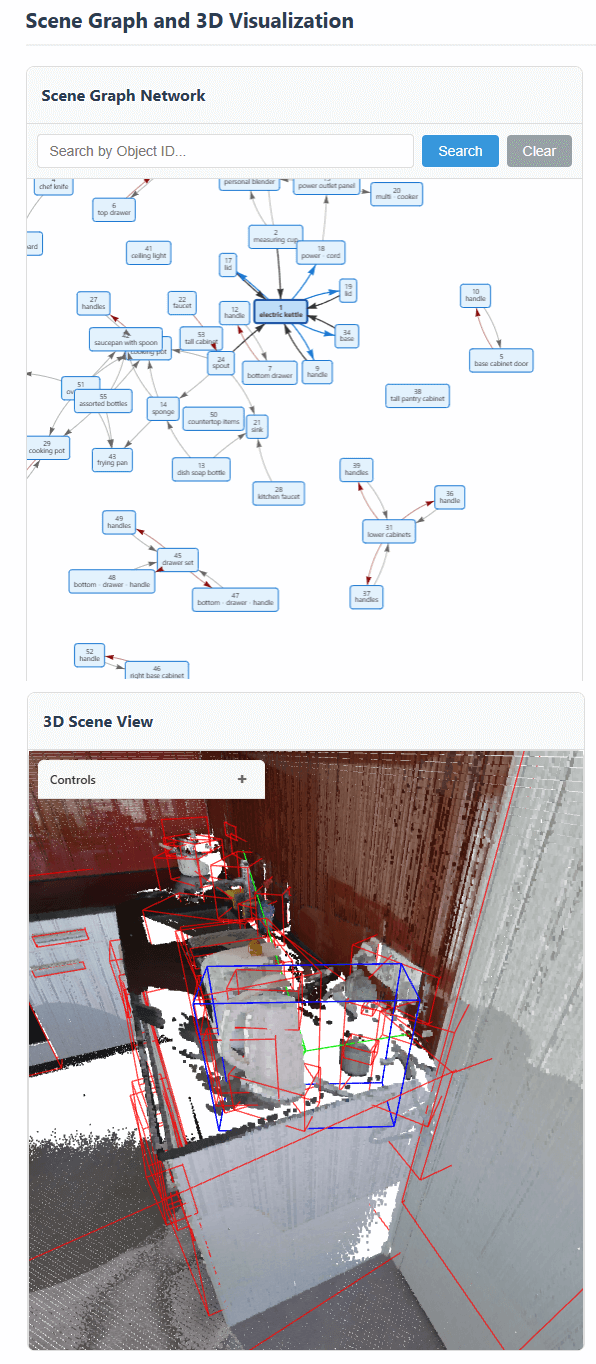
We introduce the Functional Scene Graph (FSG), which integrates both spatial and functional
relationships among objects and their parts. The FSG is generated through a mapping pipeline
powered by foundation models, while the uncertainty of ambiguous functional edges is quantified
using probabilistic graphical models, with commonsense priors from visual-language models
(VLMs). This uncertainty-aware FSG then guides the physical verification of ambiguous functional
relationships in the real world, improving the robot's scene understanding and decision-making
capabilities.
We enable the Transformer Robot, a legged-wheel quadrupedal platform, to shoot basketballs from
the free-throw line while crouched and self-correct shot errors. The shooting policy was trained
in Isaac Lab using proximal policy optimization (PPO), and a neural event ODE-based correction
module was implemented to model the shooting dynamics. By performing online gradient descent on
policy parameters based on observed errors, the system iteratively refined shots to improve
accuracy until successful scoring.
Bachelor thesis - Multi-threaded nonlinear MPC with PIPG for
Legged Robots
A numerical implementation of a parallelizable QP solver named Proportional-Integral Projected
Gradient (PIPG) under the nonlinear MPC (NMPC) framework of OCS2 which verified the feasibility
of boosting control frequency by parallel computing.
The implementation has been open sourced as the
ocs2_slp
package under the
ocs2
repository. For more information, please see my Bachelor thesis.
Primal-Dual Augmented Lagrangian (PDAL) Solver for Model Predictive Control
A novel primal-dual formulation of augmented Lagrangian named PDAL that can greatly mitigate the
numerical issue associated with the ill-conditioned Hessian and speed up convergence.
A concise LDL factorization routine dedicated for model predictive control. Loop-unrolling and
code generation techniques are utilized to speed up factorization of problems with
fixed-horizon.
Joint Spatial-Temporal Motion Planning for Manipulators
Many motion planning methods ignore temporal dimension of dynamic obstacles, frequently treating
them as static at each timestamp. This approach often leads to becoming stuck in local minima or
an inability to find solutions. Through the integration of Safe Interval Path Planning (SIPP)
with Trajectory Optimization (TO), the planner can incorporate wait actions between active
moves, exploring the temporal dimension of the problem and thereby avoiding certain local
minima.
OCS2 Toolbox - Optimal Control for Switched Systems
I revised the parallelization scheme of the backward pass of different dynamical programming
(DDP) in OCS2 which improved the performance be 18%. The pull requests (PRs) are merged into the
main branch and the toolbox is available at
OCS2.
Motion Planning for Mobile Robots with iLQR: A Model Predictive Control Approach
A MPC-iLQR controller for differential wheeled robots that is capable of reasoning about dynamic
obstacles and replanning online.
From this course, I learnt unconstrained optimization, Constrained Optimization, Linear Quadratic
Regulator(LQR), Linear Quadratic Gaussian(LQG), Convex MPC, Dynamic
Programming(DDP),
Direct Collocation, Sequential Quadratic Programming(SQP) and Optimization for Hybrid
System
A comprehensive introduction to aerial robots. Topics include
rigid-body dynamics, system modeling, control, trajectory planning, sensor fusion, and
vision-based state estimation.


 Github
Github LinkedIn
LinkedIn